Scenes
Overview
We provide four types of scenes.
EmptySceneandStadiumScene: they are simple scenes with flat grounds and no obstacles, useful for debugging purposes.StaticIndoorScene: it loads static 3D scenes fromigibson.g_dataset_path.InteractiveIndoorScene: it loads fully interactive 3D scenes fromigibson.ig_dataset_path.
Typically, they take in the scene_id of a scene and provide a load function that be invoked externally (usually by import_scene of the Simulator).
To be more specific, the load function of StaticIndoorScene
stores the floor information (we have many multistory houses in our dataset)
loads the scene mesh into PyBullet
builds an internal traversability graph for each floor based on the traversability maps stored in the scene folder (e.g.
dataset/Rs/floor_trav_0.png)provides APIs for sampling a random location in the scene, and for computing the shortest path between two locations in the scene.
In addition to everything mentioned above, the load function of InteractiveIndoorScene also
provides material/texture randomization functionality: randomize the material, texture and dynamic property of scene object models
provides object randomization functionality: randomize scene object models while keeping object poses and categories intact
provides scene quality check: check if object models have collisions and if fixed, articulated objects can extend their joints fully without collision
provides partial scene loading functionality: 1) only load objects of certain categories, 2) only load objects in certain room types, 3) only load objects in certain room instances.
provides APIs for changing the state of articulated objects (e.g. open all “fridges” and “ovens” in the scene)
Most of the code can be found here: igibson/scenes.
Adding other scenes to iGibson
We provide detailed instructions and scripts to import scenes from the following sources into iGibson:
CubiCasa5k: A Dataset and an Improved Multi-Task Model for Floorplan Image Analysis. (Kalervo, Ahti, et al.)
3D-FRONT: 3D Furnished Rooms with layOuts and semaNTics. (Fu, Huanl, et al.)
Instruction can be found here: External Scenes.
Examples
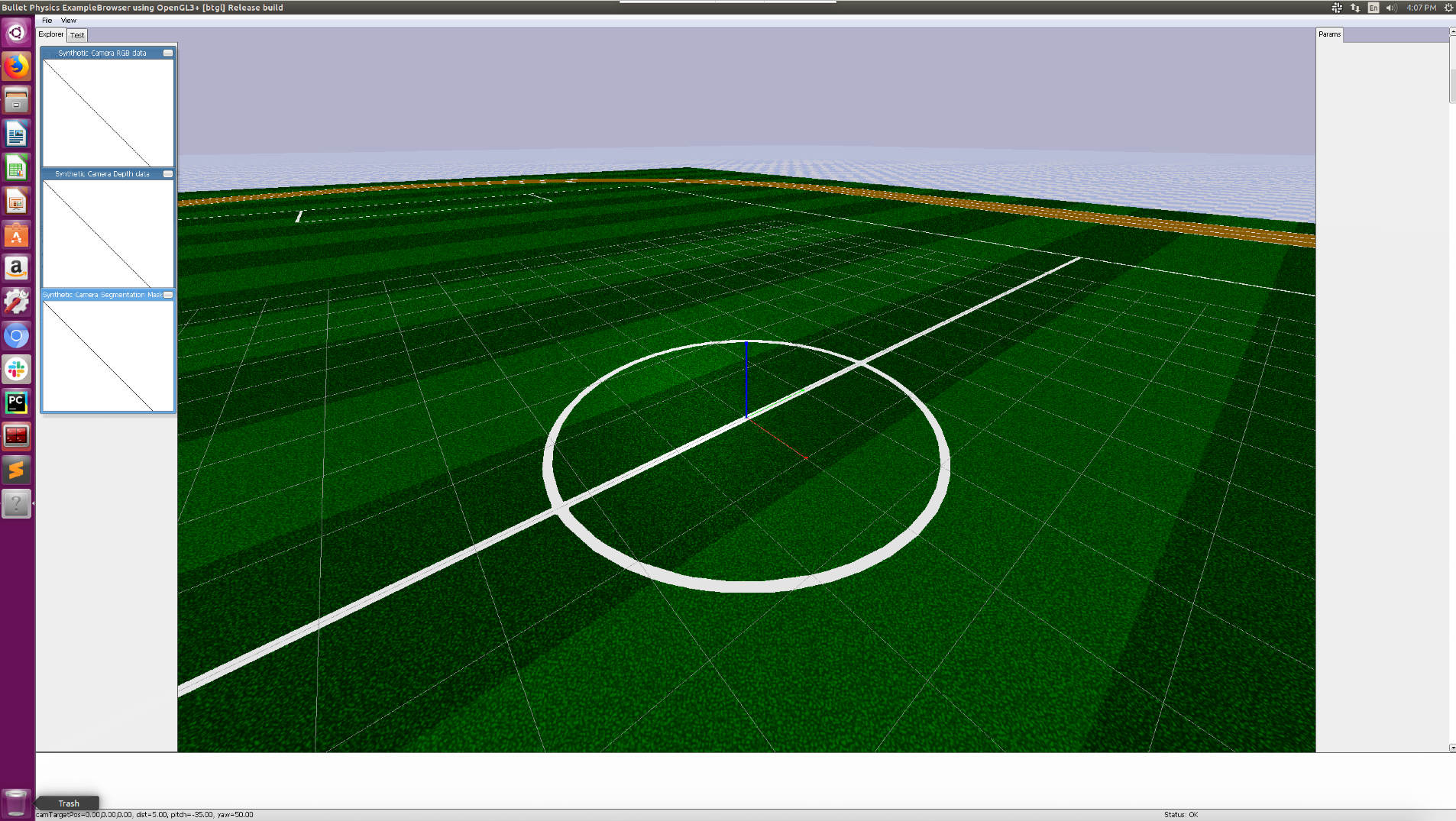
Stadium Scenes
In this example, we import a simple stadium scene that is good for debugging. The code can be found here: igibson/examples/scenes/stadium_example.py.
import logging
from igibson.render.mesh_renderer.mesh_renderer_settings import MeshRendererSettings
from igibson.render.profiler import Profiler
from igibson.scenes.stadium_scene import StadiumScene
from igibson.simulator import Simulator
def main(selection="user", headless=False, short_exec=False):
"""
Loads the Stadium scene
This scene is default in pybullet but is not really useful in iGibson
"""
print("*" * 80 + "\nDescription:" + main.__doc__ + "*" * 80)
settings = MeshRendererSettings(enable_shadow=False, msaa=False)
s = Simulator(
mode="gui_interactive" if not headless else "headless",
image_width=512,
image_height=512,
rendering_settings=settings,
)
scene = StadiumScene()
s.import_scene(scene)
max_steps = -1 if not short_exec else 1000
step = 0
while step != max_steps:
with Profiler("Simulator step"):
s.step()
step += 1
s.disconnect()
if __name__ == "__main__":
logging.basicConfig(level=logging.INFO)
main()
The stadium scene looks like this:
Static Building Scenes
In this example, we import a static scene, and then randomly sample a pair of locations in the scene and compute the shortest path between them. The code can be found here: igibson/examples/scenes/g_scene_selector.py.
import logging
from sys import platform
import numpy as np
from igibson.render.mesh_renderer.mesh_renderer_settings import MeshRendererSettings
from igibson.render.profiler import Profiler
from igibson.scenes.gibson_indoor_scene import StaticIndoorScene
from igibson.simulator import Simulator
from igibson.utils.assets_utils import get_available_g_scenes
from igibson.utils.utils import let_user_pick
def main(selection="user", headless=False, short_exec=False):
"""
Prompts the user to select any available non-interactive scene and loads it.
Shows how to load directly scenes without the Environment interface
Shows how to sample points in the scene and how to compute geodesic distance and the shortest path
"""
print("*" * 80 + "\nDescription:" + main.__doc__ + "*" * 80)
available_g_scenes = get_first_options()
scene_id = available_g_scenes[let_user_pick(available_g_scenes, selection=selection) - 1]
settings = MeshRendererSettings(enable_shadow=True, msaa=False)
# Reduce texture scale for Mac.
if platform == "darwin":
settings.texture_scale = 0.5
s = Simulator(
mode="gui_interactive" if not headless else "headless",
image_width=512,
image_height=512,
rendering_settings=settings,
)
scene = StaticIndoorScene(
scene_id,
build_graph=True,
)
s.import_scene(scene)
# Shows how to sample points in the scene
np.random.seed(0)
for _ in range(10):
random_floor = scene.get_random_floor()
p1 = scene.get_random_point(random_floor)[1]
p2 = scene.get_random_point(random_floor)[1]
shortest_path, geodesic_distance = scene.get_shortest_path(random_floor, p1[:2], p2[:2], entire_path=True)
print("Random point 1: {}".format(p1))
print("Random point 2: {}".format(p2))
print("Geodesic distance between p1 and p2: {}".format(geodesic_distance))
print("Shortest path from p1 to p2: {}".format(shortest_path))
if not headless:
input("Press enter")
max_steps = -1 if not short_exec else 1000
step = 0
while step != max_steps:
with Profiler("Simulator step"):
s.step()
step += 1
s.disconnect()
def get_first_options():
return get_available_g_scenes()
if __name__ == "__main__":
logging.basicConfig(level=logging.INFO)
main()
Interactive Building Scenes
In this example, we import a fully interactive scene, and randomly sample points given a room type such as “living_room”. This can be useful for tasks that require the robot to always be spawned in certain room types. We support fifteen such scenes right now as part of the new iGibson Dataset. The code can be found here: igibson/examples/scenes/ig_scene_selector.py.
Note that all objects in these scenes can be interacted realistically.

import logging
from sys import platform
import numpy as np
from igibson.render.mesh_renderer.mesh_renderer_settings import MeshRendererSettings
from igibson.render.profiler import Profiler
from igibson.scenes.igibson_indoor_scene import InteractiveIndoorScene
from igibson.simulator import Simulator
from igibson.utils.assets_utils import get_available_ig_scenes
from igibson.utils.utils import let_user_pick
def main(selection="user", headless=False, short_exec=False):
"""
Prompts the user to select any available interactive scene and loads it.
Shows how to load directly scenes without the Environment interface
Shows how to sample points in the scene by room type and how to compute geodesic distance and the shortest path
"""
print("*" * 80 + "\nDescription:" + main.__doc__ + "*" * 80)
available_ig_scenes = get_first_options()
scene_id = available_ig_scenes[let_user_pick(available_ig_scenes, selection=selection) - 1]
settings = MeshRendererSettings(enable_shadow=True, msaa=False)
if platform == "darwin":
settings.texture_scale = 0.5
s = Simulator(
mode="gui_interactive" if not headless else "headless",
image_width=512,
image_height=512,
rendering_settings=settings,
)
scene = InteractiveIndoorScene(
scene_id,
# load_object_categories=[], # To load only the building. Fast
build_graph=True,
)
s.import_scene(scene)
# Shows how to sample points in the scene
np.random.seed(0)
for _ in range(10):
pt = scene.get_random_point_by_room_type("living_room")[1]
print("Random point in living_room: {}".format(pt))
for _ in range(10):
random_floor = scene.get_random_floor()
p1 = scene.get_random_point(random_floor)[1]
p2 = scene.get_random_point(random_floor)[1]
shortest_path, geodesic_distance = scene.get_shortest_path(random_floor, p1[:2], p2[:2], entire_path=True)
print("Random point 1: {}".format(p1))
print("Random point 2: {}".format(p2))
print("Geodesic distance between p1 and p2: {}".format(geodesic_distance))
print("Shortest path from p1 to p2: {}".format(shortest_path))
if not headless:
input("Press enter")
max_steps = -1 if not short_exec else 1000
step = 0
while step != max_steps:
with Profiler("Simulator step"):
s.step()
step += 1
s.disconnect()
def get_first_options():
return get_available_ig_scenes()
if __name__ == "__main__":
logging.basicConfig(level=logging.INFO)
main()
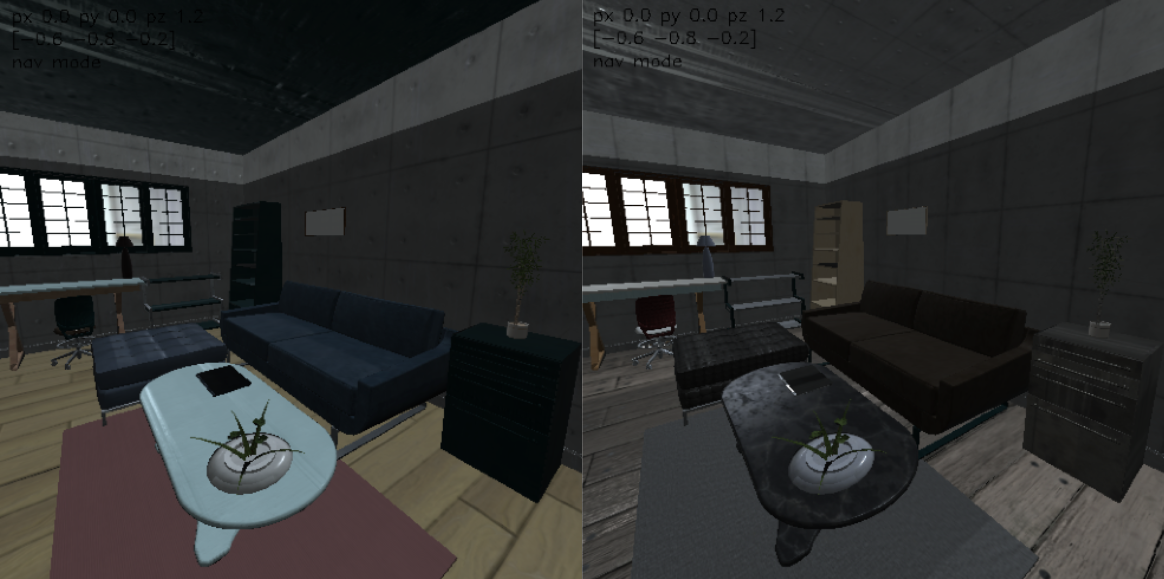
Texture Randomization
In this example, we demonstrate material/texture randomization functionality of InteractiveIndoorScene. The goal is to randomize the material, texture and dynamic properties of all scene objects by calling scene.randomize_texture on-demand. The code can be found here: igibson/examples/scenes/scene_texture_rand_example.py.
The randomized materials in the ExternalView window should look like this.
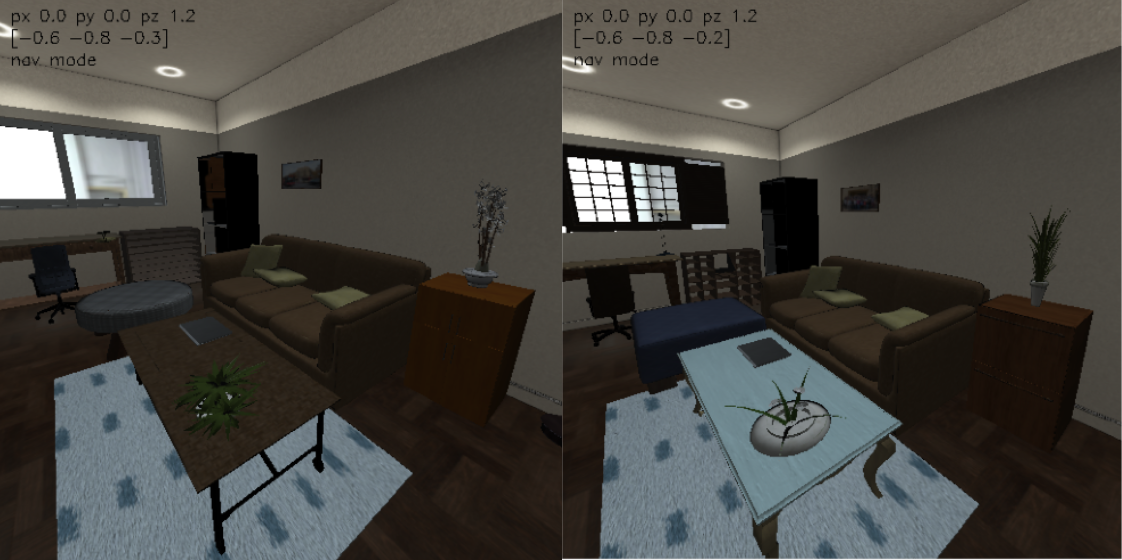
Object Randomization
In this example, we demonstrate object randomization functionality of InteractiveIndoorScene. The goal is to randomize the object models while maintaining their poses and categories. Note that when object models are randomized, there is no guarantee that they have no collisions or the fixed, articulated objects can extend their joints without collision. We provide scene.check_scene_quality functionality to check scene quality and you should do object model re-sampling if this function returns False. An alternative way (recommended) is to use randoml object model configuration that we provide (10 for each scenes) which guarantees scene quality, by passing in object_randomization_idx=[0-9]. Finally, object randomization can be expensive because the new object models need to be loaded to the simulator each time, so we recommend only using it occasionally (e.g. every 1000 training episodes). The code can be found here: igibson/examples/scenes/scene_texture_rand_example.py.
The randomized object models in the ExternalView window should look like this.
Partial Scene Loading
In this example, we demonstrate partial scene loading functionality of InteractiveIndoorScene. Specifically in this example we only load “chairs” in “living rooms”. This can be useful for tasks that only require certain object categories or rooms. The code can be found here: igibson/examples/scenes/scene_partial_loading_example.py.
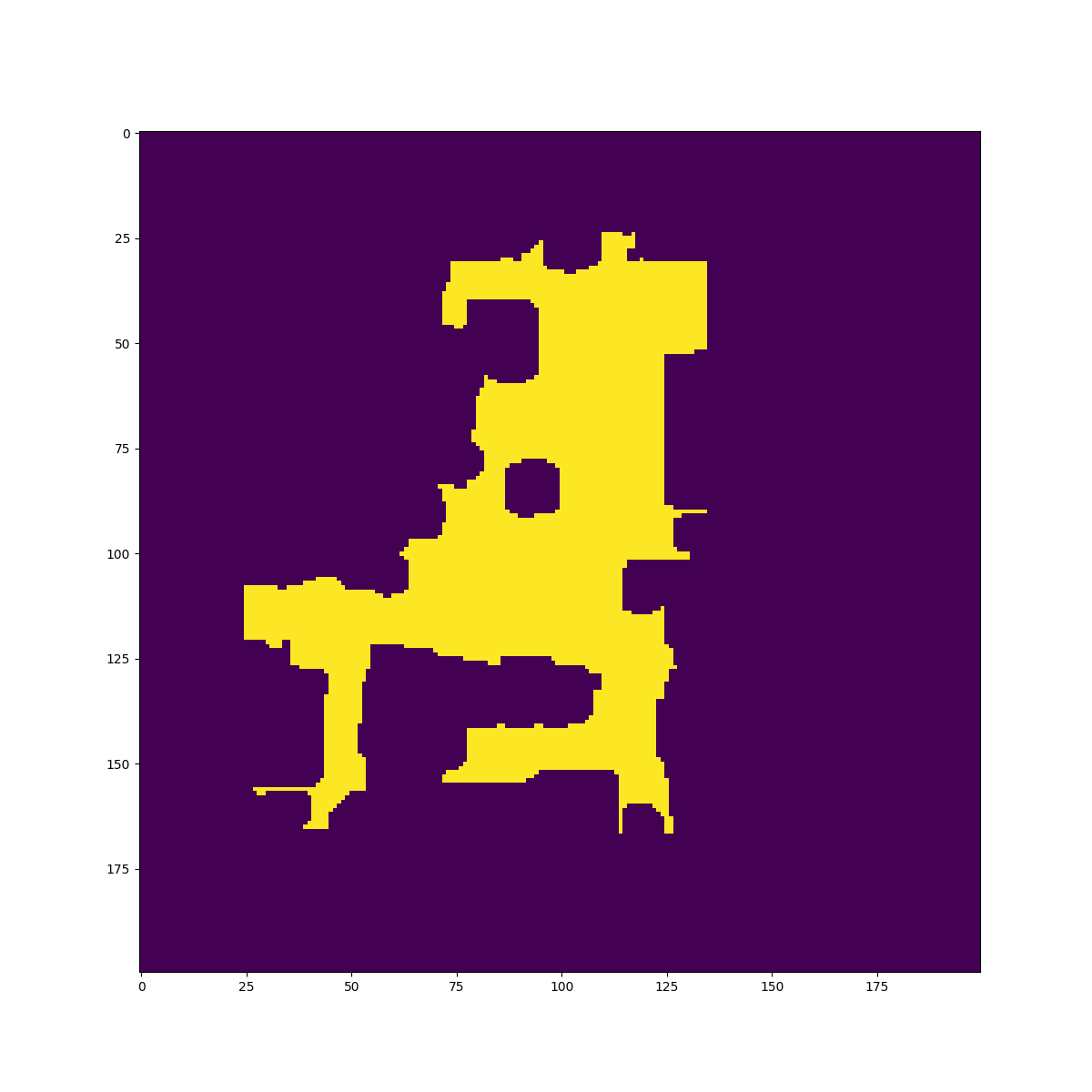
Visualize Traversability Map
In this example, we visuliaze the traversability map of a scene. We use this map to build an internal traversability graph for each floor so that we can compute the shortest path between two locations, and place robots and objects at valid locations inside the scene. The code can be found here: igibson/examples/robots/trav_map_vis_example.py.
The traversability map of the scene Rs looks like this: