Introduction¶
 PErception and Robotic Learning System v2
PErception and Robotic Learning System v2
perls2 provides robot software infrastructure for projects within SVL. It serves as a unified framework that connects both simulated and real robots, sensors, renders and simulation environments for performing robotics experiments.
New to perls2? Start Here
Features¶
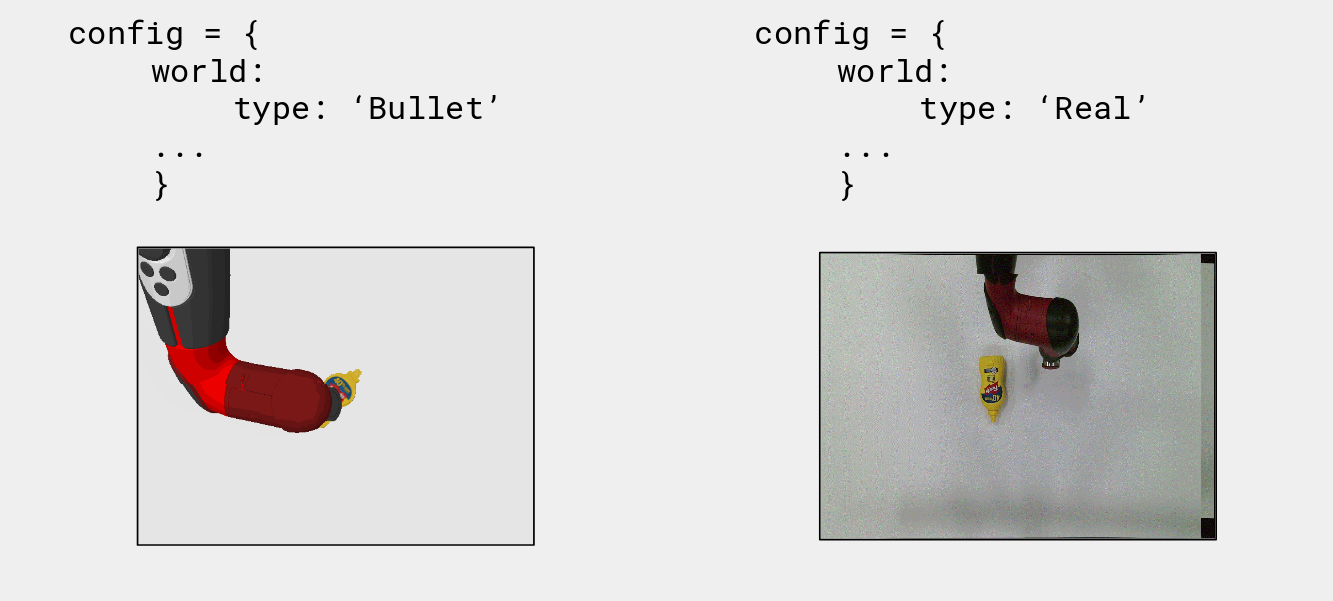
perls2 makes it easier to run experiments on real robots. Code for running experiments is agnostic to the simulation / reality. This means that code written for simulation can be made to run on real robots, just by changing a single config key. It is also easy to switch between the different robots offered in the lab.
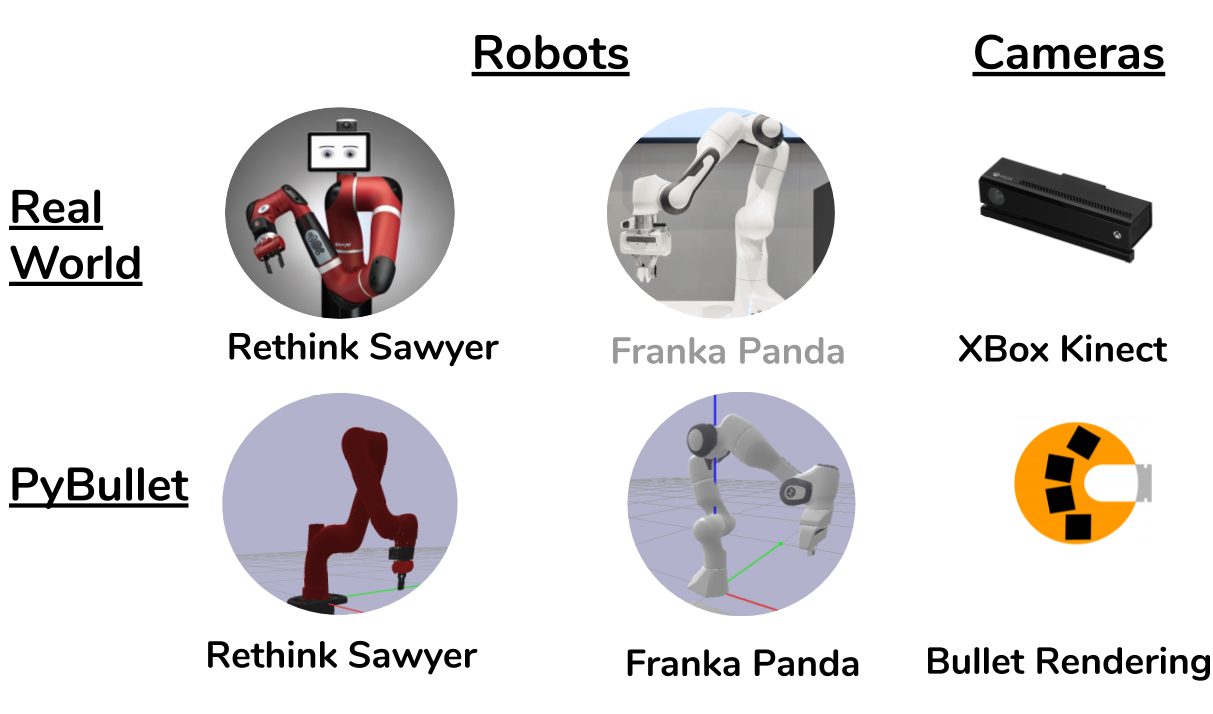
Available Robots, Cameras and Renderers¶
Controllers¶
perls2 offers consistent robot control between simulated and real robots through a unified torque-based library of robot controllers. This makes it easy to explore different action spaces and forms for robot control. Current controllers include:
Joint Impedance
Operational Space Control
Joint Velocity
Joint Torque
Easily switch from sim to real.¶
Why use perls2?¶
Additionally, perls2 offers consistent robot control between simulated and real robots through a unified torque-based library of robot controllers. This makes it easy to explore different action spaces and forms for robot control. Current controllers include:
Joint Impedance
Operational Space Control
Joint Velocity
Joint Torque
All controllers have been validated to meet specifications and performance metrics.
Installing¶
PERLS2 only supports python3.6 for the core libraries (python 2.7 is used for interfacing to robots that use ROS.) PERLS2 only supports ubuntu 16.04 and later.
On Ubuntu 16.04¶
Clone and install PERLs repo
Clone repo:
git clone https://github.com/StanfordVL/perls2.gitCreate a virtual environment, e.g.
virtualenv -p python3.6 perls2envSource your virtual environment e.g.
source perls2env/bin/activateGo to the perls2 directory and install requirements
cd ~/perls2pip install -r requirements.txtInstall perls2
pip install -e .